
本文将为大家介绍一款自主研发的小型ROV数据采集上位机软件,阐述其在水下作业中的重要作用、功能特点、安装使用步骤、创新点以及可能遇到的故障排除方法。
开篇引言
想象一下这样的场景:在水下救援的紧张现场,一艘搭载着精密设备的遥控水下机器人(ROV)正以毫米级的超高精度缓缓靠近沉船;在幽深的海底管线旁边,智能潜航器正有条不紊地执行着自主巡检任务。这些看似只存在于科幻电影中的画面,如今却真实地呈现在我们眼前。而这一切的实现,背后都离不开一套强大的岸基控制系统。今天,我们就来深入了解一款自主研发的小型ROV数据采集上位机软件,看看它是如何成为水下作业的“智慧大脑”的。
这款上位机软件堪称ROV作业的得力助手,它就像一个信息枢纽,能够实时接收并清晰地显示ROV的运行状态。无论是ROV在水下的具体位置、所处的深度,还是它的运动姿态等关键信息,都能在软件界面上一目了然。同时,用户还可以通过软件轻松地发送各种任务命令,比如定航、悬停、定深等。有了这些命令,ROV就能搭载着其他检测设备准确无误地运动到指定位置。一旦ROV在作业过程中出现异常情况,软件会立即发出报警信息,就像一个贴心的小卫士,及时提醒用户进行处理。此外,软件还具备数据保存和分析功能,它会实时保存ROV的运行参数,并动态绘制实时参数图,方便用户随时查看和分析。


安装向导
当跳出安装向导后,只需轻轻点击“下一步”,就可以继续安装流程。

确认安装
再次点击“下一步”,仔细确认安装信息。

安装完成
当安装完成后,你会惊喜地发现,桌面和开始菜单面板上都出现了软件的快捷方式,方便你随时启动软件。

登录界面
点击右上角的登录按钮,会跳出登录界面。在这里,你需要认真选择正确的串口号、波特率、停止位、数据位和校验位,然后点击登录按钮进行连接。当连接成功后,右上角的图标会变为绿色,这就表示你已经成功登录软件啦。

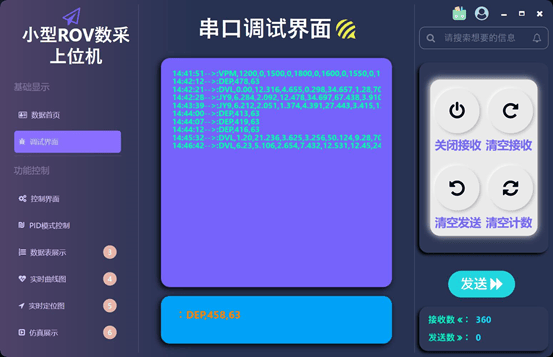
调试界面
在调试界面,你可以实时查看ROV串口接收和发送的数据。如果你想要对ROV进行更精细的控制,还可以手动发送控制命令,指示ROV按照你的意愿航行。
控制界面
控制界面为你提供了ROV运动控制的直观界面。在这里,你可以轻松实现ROV的上浮、下浮、左移、右移、前进、后退等微小运动控制,还能对速度进行精准控制,同时深度计反馈功能也能让你实时了解ROV的深度信息。

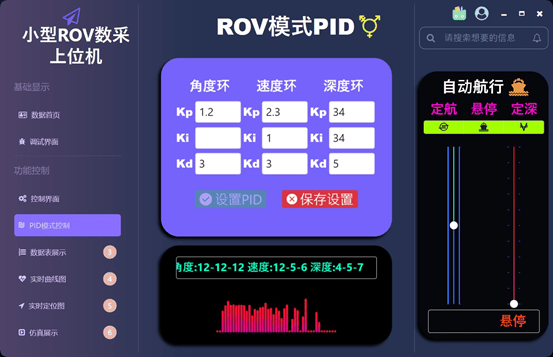
PID模式控制
在PID模式控制界面,你可以根据实际需求设置ROV运动的PID参数,从而实现自动航行功能,让ROV更加智能地完成作业任务。
实时定位图
实时定位图界面调用了百度地图API,它能够清晰地展示ROV的实时位置信息。此外,还提供了测距和实时跟踪功能,让你对ROV的行踪了如指掌。


软件创新点
这款软件具有诸多创新之处。它采用了扁平化的设计界面和人性化的交互方式,让用户在操作过程中更加轻松、便捷,即使是初次使用的用户也能快速上手。同时,软件采用松耦合的设计模式,有效地节省了资源开销,使得软件运行更加流畅,不会出现卡顿现象。此外,该软件在水下ROV控制及反馈领域积累了宝贵的设计经验,为行业的发展提供了有益的参考。
软件故障排除
在使用软件的过程中,可能会遇到一些错误情况。例如,在展示数据表界面时,双击某张表格可能会弹出错误信息。这通常是因为表格被外部修改过,遇到这种情况,你可以检查表格是否被修改,并进行相应的调整。

本文详细介绍了自主研发的小型ROV数据采集上位机软件,它是水下作业的“智慧大脑”,具备实时接收显示信息、任务命令发送、异常报警等功能。文章还说明了软件的安装使用步骤、创新点以及可能遇到的故障及解决方法,展示了该软件在水下作业领域的重要价值和应用前景。
原创文章,作者:Foster,如若转载,请注明出处:https://www.gouwuzhinan.com/archives/44102.html