
具身智能公司「RoboScience」完成数千万种子轮融资的消息,阐述了公司的创立背景、核心团队成员及其成就,详细说明了公司的技术成果、数据优势以及商业化规划,展现了其在具身智能领域的发展潜力。
近日,具身智能领域的一颗新星——「RoboScience」(北京机科未来科技有限公司)对外宣布,已成功完成数千万的种子轮融资。此次融资由零一创投独家投资,而这笔资金将主要投入到产品研发和团队搭建方面,为公司的进一步发展注入强大动力。
「RoboScience」成立于2024年,它的诞生颇具传奇色彩。由前苹果技术主管田野与新加坡国立大学助理教授邵林共同创立,这两位行业精英携手产业专家以及顶尖高校的科研人才,立志打造全球领先的具身智能大小脑模型及相关产品。
前苹果技术主管与NUS助理教授的强强联合,正加速AI技术在产业中的落地进程。公司创始人兼CEO田野,是一位不折不扣的学术和技术大咖。他曾以专业第一的优异成绩从中科大物理系毕业,随后前往斯坦福人工智能实验室深造,师从知名学者吴恩达。在苹果工作的7年里,他成为了苹果总部最年轻的主任工程师之一。作为技术主管,他带领团队精心打造了苹果的机器学习平台。这个平台不仅支撑了相机、Siri、Apple Intelligence等一系列AI应用,还构建了CoreML、ARKit、Vision Framework、NLP framework等AI生态框架。田野团队推出的多项世界领先的端侧训练和推理技术,服务了数亿用户和数十亿设备,这让他积累了将AI技术完美落地到软硬件产品的丰富经验。
另一位创始人兼首席科学家邵林,目前在新加坡国立大学担任助理教授,专注于具身智能领域的研究。邵林博士毕业于斯坦福大学,师从Jeannette Bohg和Leonidas J. Guibas教授。在学术研究上,他成果斐然。2023年,他合作发表的论文提出了SAM - RL方法,有效解决了对世界进行高效建模的问题,该论文还入围了国际机器人顶会RSS的最佳系统论文奖。到了2024年,他带领团队提出了D(R,O) Grasp方法,通过创新性地建立机器手与物体在抓取姿态下的交互模型,成功实现了对机器手与物体几何形状的高度泛化能力,极大提升了抓取速度,重塑了跨智能体灵巧手抓取,并获得了CoRL MAPoDeL Workshop最佳机器人论文。
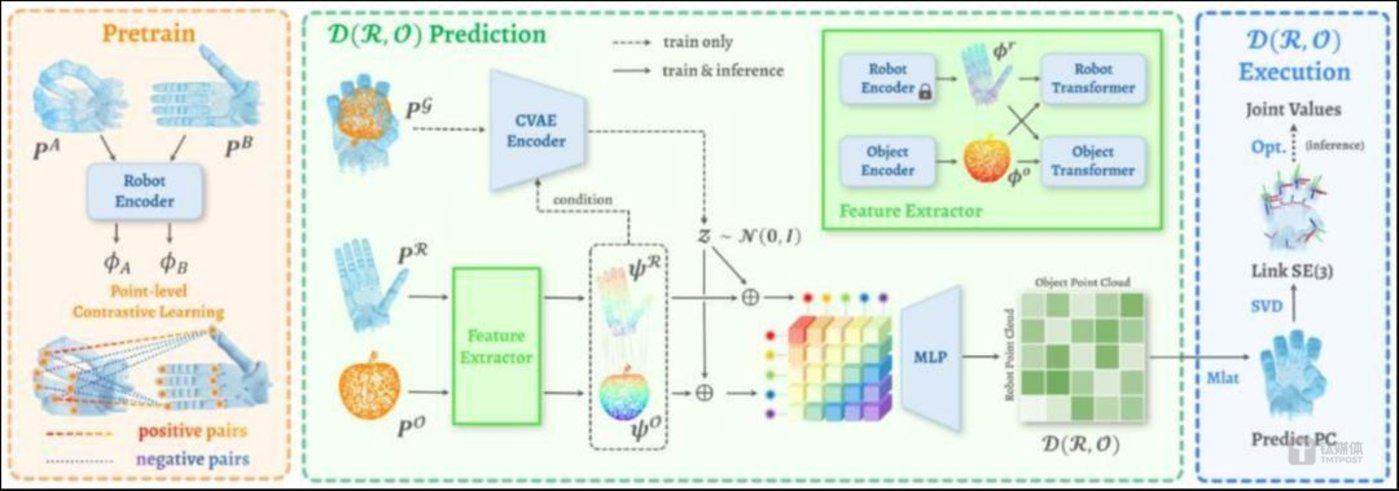

D(R,O) Grasp 整体框架
在技术探索的道路上,「RoboScience」已经实现了三个维度的高度泛化,多源海量数据助力其模型不断迭代升级。田野与邵林相识于斯坦福校园,在过去的数年间,他们一直在不断探索AI改造世界的方式。经过多年的深入思考与反复验证,两人发现大规模预训练的方式不仅在自然语言领域能够取得成功,还可以赋予机器人通用操作的能力。
2024年上半年,田野与邵林完成了思路验证,并推出了Manipulation Foundation Model。这个统一操作大模型成为了视觉语言大模型与物理世界之间的桥梁,实现了三个维度的泛化:能够指导任意的机器人,操作任意物体,完成任意任务。例如,在抓取操作方面,与现有方法基于特定物体和特定机器手不同,该方法在操作成功率、姿态多样性以及计算速度方面均取得了显著提升,为灵巧抓取任务提供了全新的解决方案。以这个方法为起点,「RoboScience」正式成立。
在技术路线上,「RoboScience」从成立之初就坚定地选择了做快慢脑分层模型,这一选择与海外明星公司Figure的探索方向不谋而合。另一明星公司Physical Intelligence最新发布的模型也从端到端VLA模型转为了分层模型。田野表示,“尽管中间有很多别的技术方向都在不断涌现,但我们一直坚持的就是快慢脑,也就是执行与规划分层、两者各自通用。最近各公司的新进展,一方面让我们感受到了压力和动力,另一方面也让我们不断坚持的这个方向得到了更多认同的声音。”
「RoboScience」对于自研模型充满自信,这还来源于他们在数据层面的不断突破。不同于大语言模型可以从网络上轻松抓取数据,数据来源问题一直是具身智能发展的一大阻碍。而「RoboScience」已建立了规模化获取并使用仿真数据、视频数据和真实数据的系统,该系统覆盖了日常生活中可见的各种类型及各种维度的物体和任务,不仅提升了数据质量,还降低了数据成本。
从实验室走向商业化,「RoboScience」有着清晰且明确的规划。基于其技术的高度泛化能力,「RoboScience」的产品将根据落地场景的具体需求,高效适配不同配置和性能的硬件,从而拓展落地场景、提升落地效率。选择这样的开发路径,是基于「RoboScience」团队对于市场的深刻洞察。其一,随着具身智能的发展,未来不同场景下需要不同的硬件设备,很难用一个统一的硬件来覆盖机器人需要完成的所有任务。其二,背靠中国的供应链优势,硬件成本正在快速下降,此时推出通用操作的软件模型,有利于将供应链优势在具身智能领域快速发挥出来。其三,由于软件研发迭代速度显著快于硬件,对于「RoboScience」这样在软件方面有丰富产业经验与学界技术支持的团队而言,与硬件厂商合作来开拓不同场景无疑是将自身优势最大化的选择。
“之前在苹果多年的工作经验,让我坚信要做有人文关怀的科技,将技术无缝融入生活,真正让用户受益。”展望未来,田野希望「RoboScience」能够站在技术和人文的交汇点上,成为人类的朋友和帮手。
本文介绍了具身智能公司「RoboScience」完成种子轮融资,其由前苹果技术主管田野与新加坡国立大学助理教授邵林创立。公司核心团队实力强劲,技术成果显著,实现了三个维度的泛化,选择快慢脑分层模型并在数据层面取得突破。在商业化方面,公司有清晰规划,基于技术泛化能力适配硬件,有望借助供应链优势和软件研发速度优势实现发展,未来致力于成为人类的朋友和帮手。
原创文章,作者:东海凝丝,如若转载,请注明出处:https://www.gouwuzhinan.com/archives/47605.html